B树、B+树
B树、B+树
苏丙榅1. 2-3树
1.1 2-3树的特点
2 - 3树是一种自平衡的搜索树,属于多路搜索树,它在计算机科学领域有着广泛的应用,尤其在文件系统和数据库系统中用于高效的数据存储和检索。
2 - 3树是一种阶为3的B树,即每个节点最多有3个子节点。它可以包含两种类型的节点:
2 - 节点:包含一个键和两个子节点(左子节点和右子节点)。
- 左子节点的所有键都小于该节点的键,右子节点的所有键都大于该节点的键。
- 2节点要么没有孩子,要么有两个孩子,不能只有一个孩子
3 - 节点:包含两个键(键1和键2,且键1 < 键2)和三个子节点(左子节点、中间子节点和右子节点)。
左子节点的所有键都小于键1,中间子节点的所有键都介于键1和键2之间,右子节点的所有键都大于键2。
3节点要么没有孩子,要么有三个孩子,不存在有一个孩子或者两个孩子的情况

2-节点(8):有一个数据域8和两个指针域,左子树4小于8,右子树12、14大于8
3节点(12、14):有两个数据域12和14以及3个指针域,左子树9、10小于12,中子树13介于12和14之间,右子树15大于12和14
2-3 树的所有叶子节点都位于同一层次。

2 - 3 树是一种绝对平衡的树结构,即从根节点到树中任意一个叶子节点的路径长度都是相等的。这意味着树的高度是均匀的,不会出现某些分支过长而导致搜索效率降低的情况。无论数据如何插入或删除,树始终能保持这种平衡状态,从而保证了各种操作的时间复杂度相对稳定。
1.2 2-3树的数据搜索
2 - 3 树是一种自平衡的搜索树,它的节点可以是 2 节点(包含 1 个键和 2 个子节点)或 3 节点(包含 2 个键和 3 个子节点)。搜索的整体思路是:从树的根节点开始,根据当前节点的键与要搜索的键的大小关系,决定是向左子树、中间子树(如果是 3 节点)还是右子树继续搜索,直到找到目标键或者到达叶子节点仍未找到。
下面是在 2 - 3 树中进行数据搜索的详细步骤:
从根节点开始:将搜索指针指向 2 - 3 树的根节点。
判断当前节点类型及比较键的大小
如果当前节点是 2 节点:
- 该节点包含一个键
key1和两个子节点left和right。 - 比较要搜索的键
targetKey与key1的大小:- 若
targetKey == key1:搜索成功,返回该节点。 - 若
targetKey < key1:将搜索指针移动到左子节点left,继续进行搜索。 - 若
targetKey > key1:将搜索指针移动到右子节点right,继续进行搜索。
- 若
- 该节点包含一个键
如果当前节点是 3 节点:
- 该节点包含两个键
key1和key2(key1 < key2)以及三个子节点left、middle和right。 - 比较要搜索的键
targetKey与key1和key2的大小:- 若
targetKey == key1或targetKey == key2:搜索成功,返回该节点。 - 若
targetKey < key1:将搜索指针移动到左子节点left,继续进行搜索。 - 若
key1 < targetKey < key2:将搜索指针移动到中间子节点middle,继续进行搜索。 - 若
targetKey > key2:将搜索指针移动到右子节点right,继续进行搜索。
- 若
- 该节点包含两个键
重复步骤 2:不断重复步骤 2,沿着树的路径向下搜索,直到满足以下两种情况之一:
找到目标键:在某个节点中找到了与
targetKey相等的键,此时搜索成功,返回该节点。到达叶子节点仍未找到:当搜索指针到达叶子节点(没有子节点的节点)且该节点中没有与
targetKey相等的键时,搜索失败,返回null或相应的表示未找到的标识。
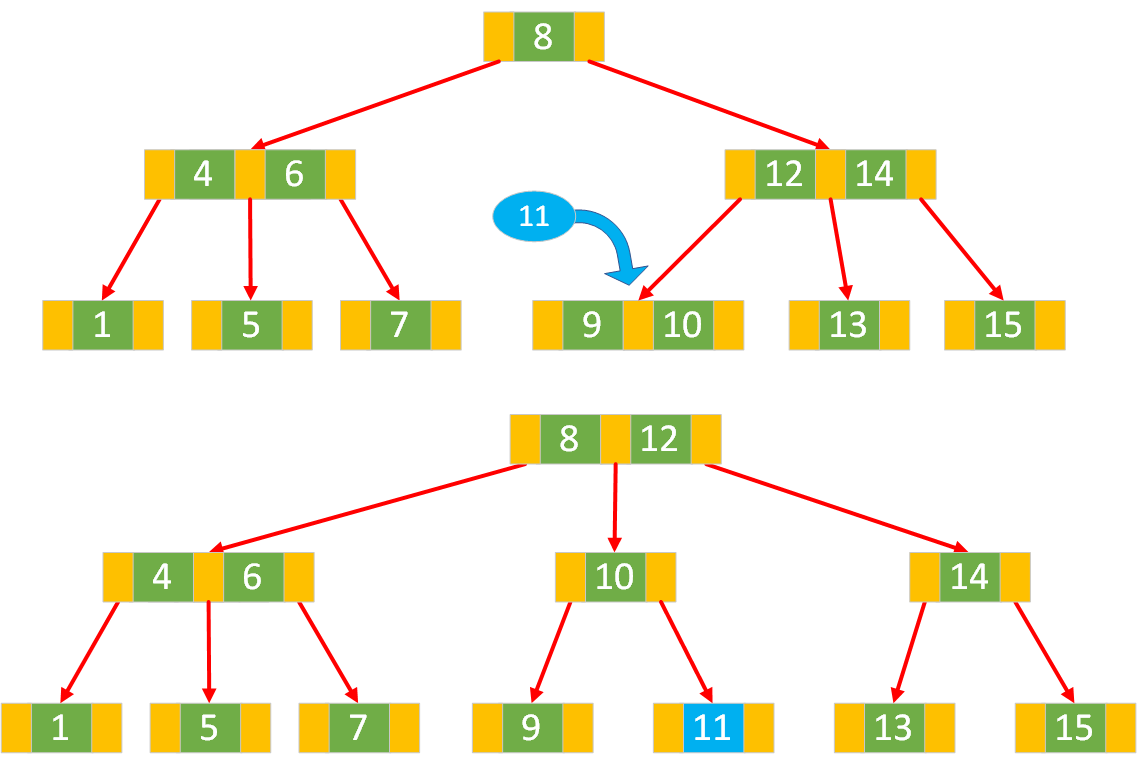
1.3 2-3树的数据插入
2 - 3 树是一种自平衡的搜索树,插入操作需要保证树的平衡性质以及节点的规则(2 节点含 1 个键和 2 个子节点,3 节点含 2 个键和 3 个子节点)。以下是 2 - 3 树数据插入的具体步骤:
查找插入位置:从根节点开始,按照搜索规则查找要插入键的合适位置。
若当前节点是 2 节点(含 1 个键
k1):- 若待插入键
newKey < k1,则进入该节点的左子节点继续查找。 - 若
newKey > k1,则进入该节点的右子节点继续查找。
- 若待插入键
若当前节点是 3 节点(含 2 个键
k1和k2,且k1 < k2):- 若
newKey < k1,则进入该节点的左子节点继续查找。 - 若
k1 < newKey < k2,则进入该节点的中间子节点继续查找。 - 若
newKey > k2,则进入该节点的右子节点继续查找。
- 若
不断重复上述过程,直到到达叶子节点,因为 2 - 3 树的插入操作总是在叶子节点进行。
插入键到叶子节点
如果是空树,插入一个 2 节点,插入操作完成。
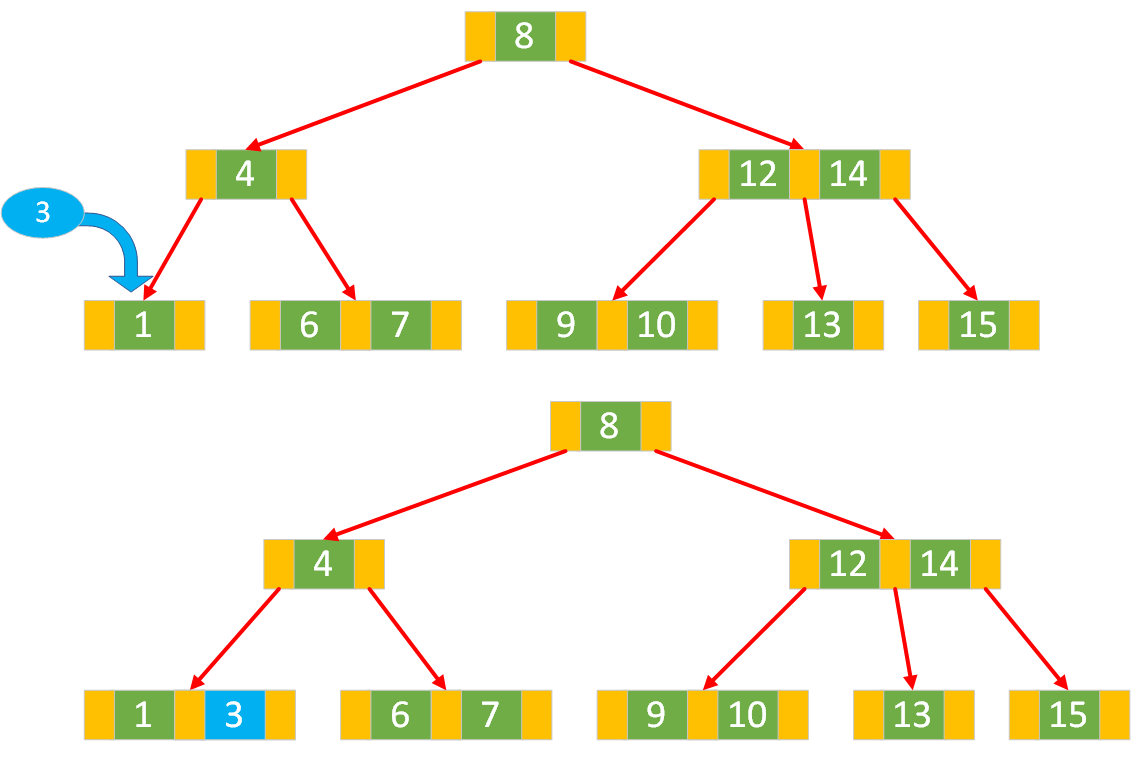
叶子节点是 2 节点:若当前叶子节点是 2 节点,直接将新键插入到该节点中,并将键按升序排列。
例如,原 2 节点键为
[k1],插入newKey后,若newKey < k1,节点变为[newKey, k1];若newKey > k1,节点变为[k1, newKey]。此时插入操作完成,树的结构无需进一步调整。
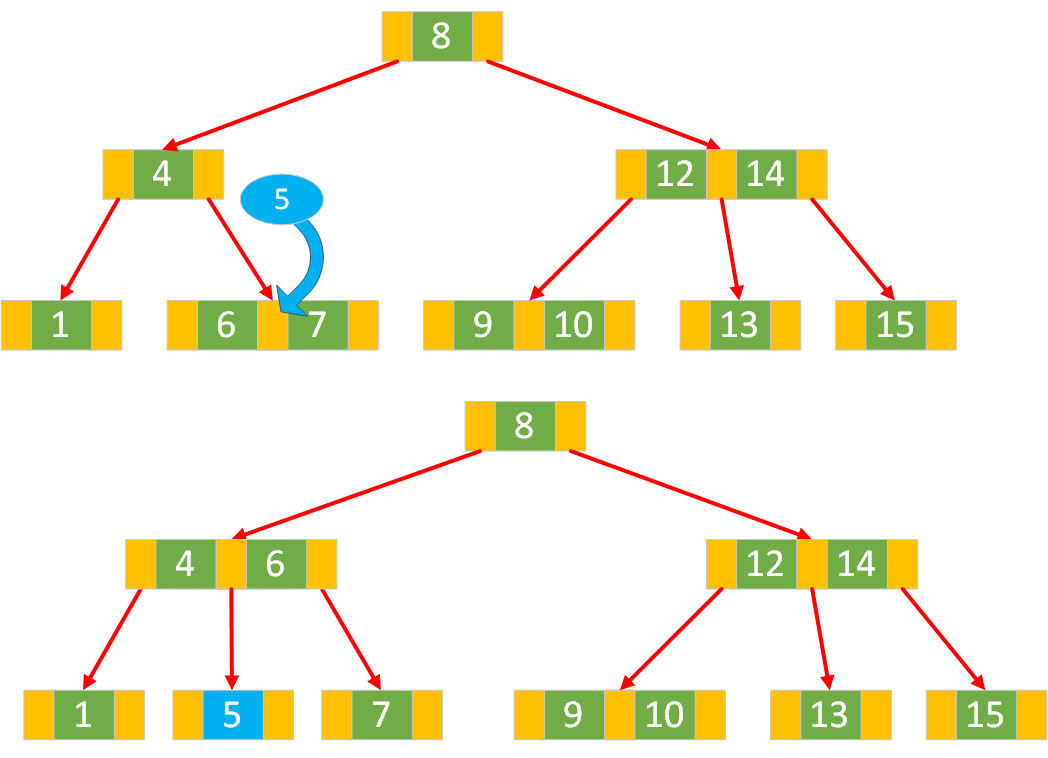
叶子节点是 3 节点:
若当前叶子节点是 3 节点(键为
[k1, k2]),插入新键newKey会导致节点溢出。需要进行节点分裂操作,具体步骤如下:将新键插入到该节点中,并将所有键按升序排列,此时节点有 3 个键,如
[a, b, c](a < b < c),此时得到一个 4 - 节点(可以存储3个键值,4个孩子)。将 4-节点 转换为一个棵由 3 个 2- 节点组成的 2-3 树
创建两个新的 2 节点:一个节点包含键
[a],另一个节点包含键[c]。把中间的键
b提升到父节点中。
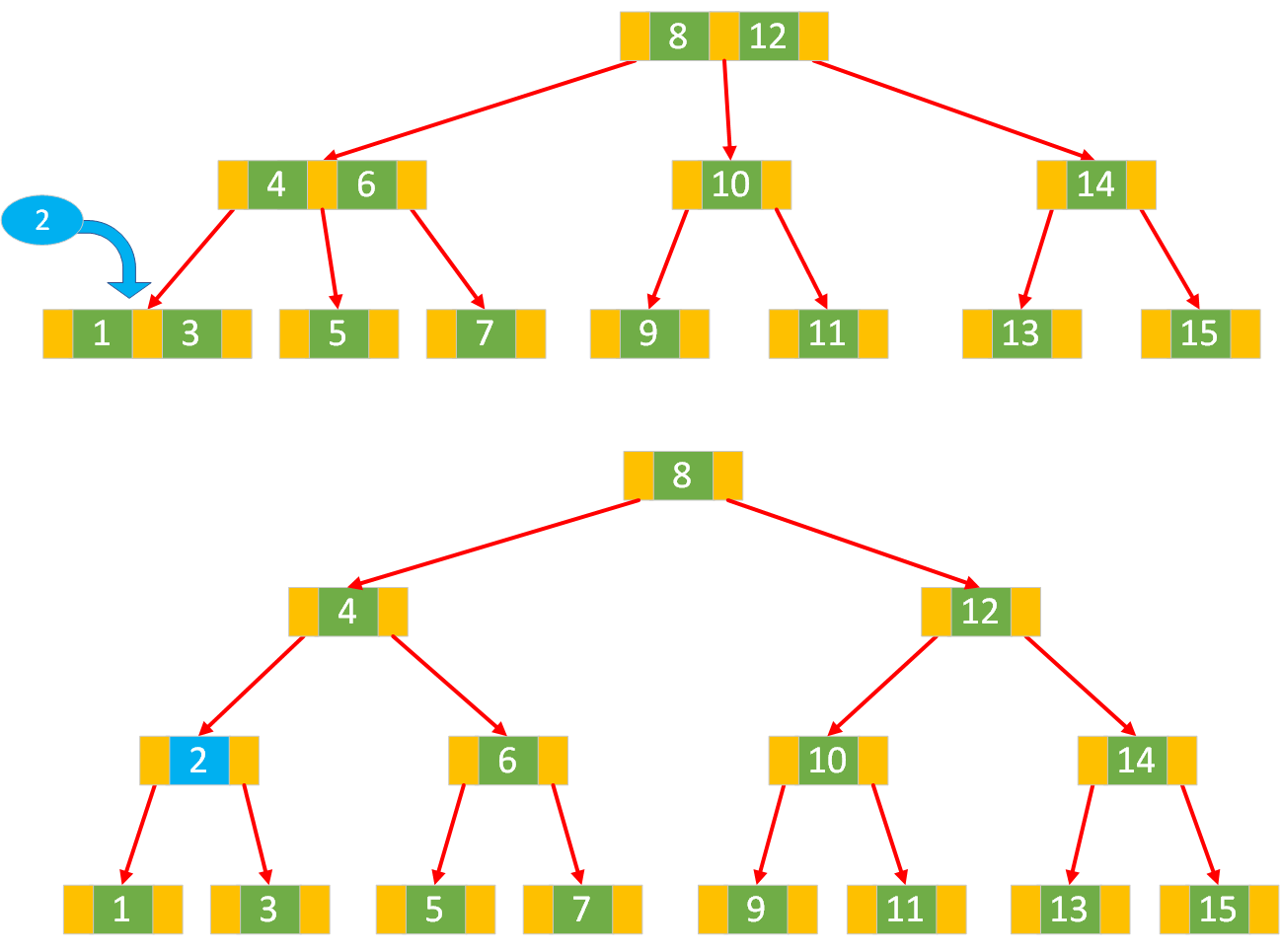
处理父节点的插入和可能的分裂
父节点是 2 节点:
若父节点是 2 节点,将从子节点提升上来的键插入到父节点中,并将父节点的子指针进行相应调整。例如,原父节点为
[p1],子节点分裂后提升键b插入,若b < p1,父节点变为[b, p1],同时调整子指针;若b > p1,父节点变为[p1, b],并调整子指针。插入操作完成,树的结构调整结束。父节点是 3 节点:
若父节点是 3 节点,插入从子节点提升上来的键会导致父节点溢出,需要对父节点进行分裂。过程与叶子节点分裂类似:
- 将提升上来的键插入到父节点中,并将所有键按升序排列。
- 创建两个新的 2 节点,分别包含部分键。
- 把中间的键提升到父节点的父节点中。
处理根节点的分裂:
若分裂操作一直向上传播到根节点,且根节点也是 3 节点,插入提升上来的键后根节点溢出,需要对根节点进行分裂:
创建两个新的 2 节点,分别包含部分键。
创建一个新的根节点,该根节点为 2 节点,包含从原根节点分裂出来的中间键,并且新根节点的两个子指针分别指向两个新创建的 2 节点。此时树的高度增加 1。
1.4 2-3树的数据删除
2 - 3 树的数据删除操作相对复杂,需要保证树的平衡性质以及节点的规则(2 节点含 1 个键和 2 个子节点,3 节点含 2 个键和 3 个子节点)。以下是 2 - 3 树数据删除的具体步骤:
查找要删除的键:从根节点开始,按照搜索规则查找要删除的键。
若当前节点是 2 节点(含 1 个键
k1):- 若要删除的键
deleteKey < k1,则进入该节点的左子节点继续查找。 - 若
deleteKey > k1,则进入该节点的右子节点继续查找。 - 若
deleteKey == k1,则找到了要删除的键。
- 若要删除的键
若当前节点是 3 节点(含 2 个键
k1和k2,且k1 < k2):- 若
deleteKey < k1,则进入该节点的左子节点继续查找。 - 若
k1 < deleteKey < k2,则进入该节点的中间子节点继续查找。 - 若
deleteKey > k2,则进入该节点的右子节点继续查找。 - 若
deleteKey == k1或deleteKey == k2,则找到了要删除的键。
- 若
删除键的情况处理
情况一:要删除的键在叶子节点
叶子节点是 3 节点:若要删除的键所在的叶子节点是 3 节点,直接从该节点中删除该键,然后将剩余的键按升序排列。
例如,原 3 节点键为
[k1, k2],若删除k1,节点变为[k2];若删除k2,节点变为[k1]。此时删除操作完成,树的结构无需进一步调整。
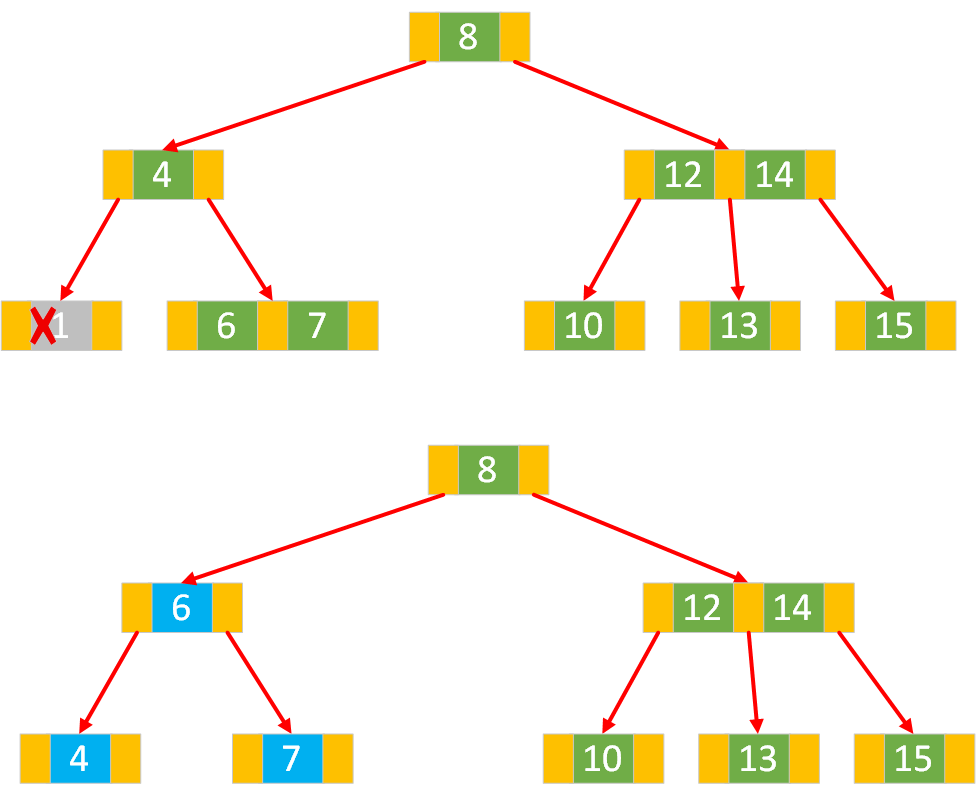
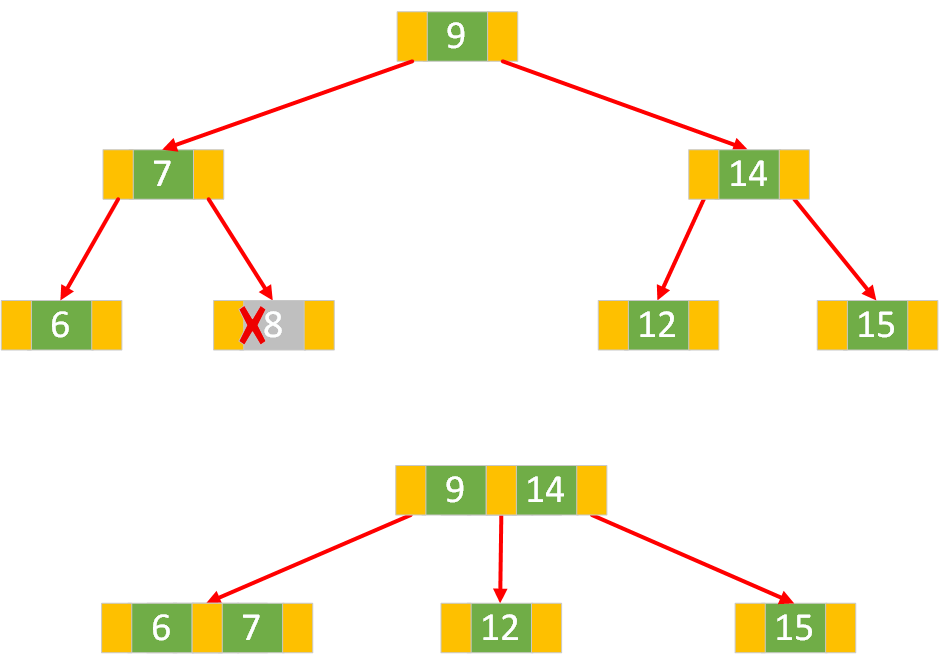
叶子节点是 2 节点:若要删除的键所在的叶子节点是 2 节点,直接删除该键会导致节点下溢(节点键数不足),需要进行节点合并或借键操作,具体如下:
情形1:此节点的父节点是 2 节点,兄弟是 3 节点。
左兄弟节点是 3 节点:将左兄弟节点的最大键移动到父节点,再将父节点中对应分隔该节点和左兄弟节点的键移动到该节点。
右兄弟节点是 3 节点:将右兄弟节点的最小键移动到父节点,再将父节点中对应分隔该节点和右兄弟节点的键移动到该节点。
情形2:此节点的父节点是 2 节点,兄弟也是 2 节点。
当前待删除节点的父节点是2-节点、兄弟节点也是2-节点,先通过移动兄弟节点的中序遍历直接后继到兄弟节点,以使兄弟节点变为3-节点;
接下来再次按照情形1进行操作,就完成了节点的删除。
情形3:此节点的父节点是 3 节点
当前待删除节点的父节点是3-节点,拆分父节点使其成为2-节点,再将父节点中最接近的一个值与中孩子合并。
2-3树为满二叉树,删除叶子节点
若2-3树是一颗满二叉树,将2-3树层树减少,并将当前删除节点的兄弟节点合并到父节点中,同时将父节点的所有兄弟节点合并到父节点的父节点中。
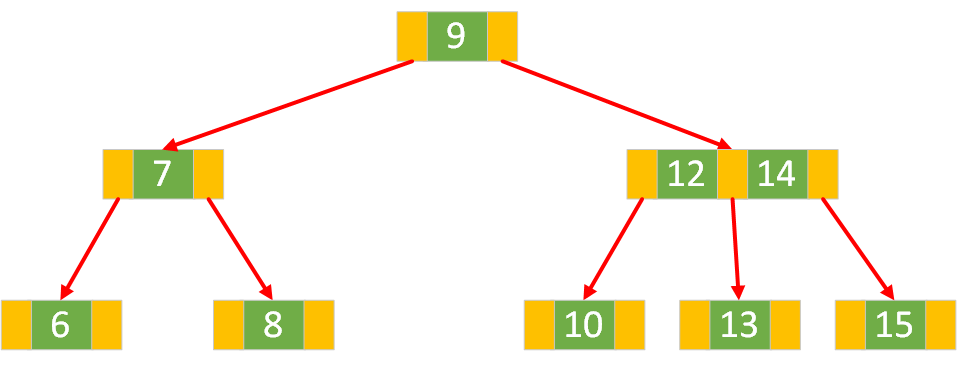
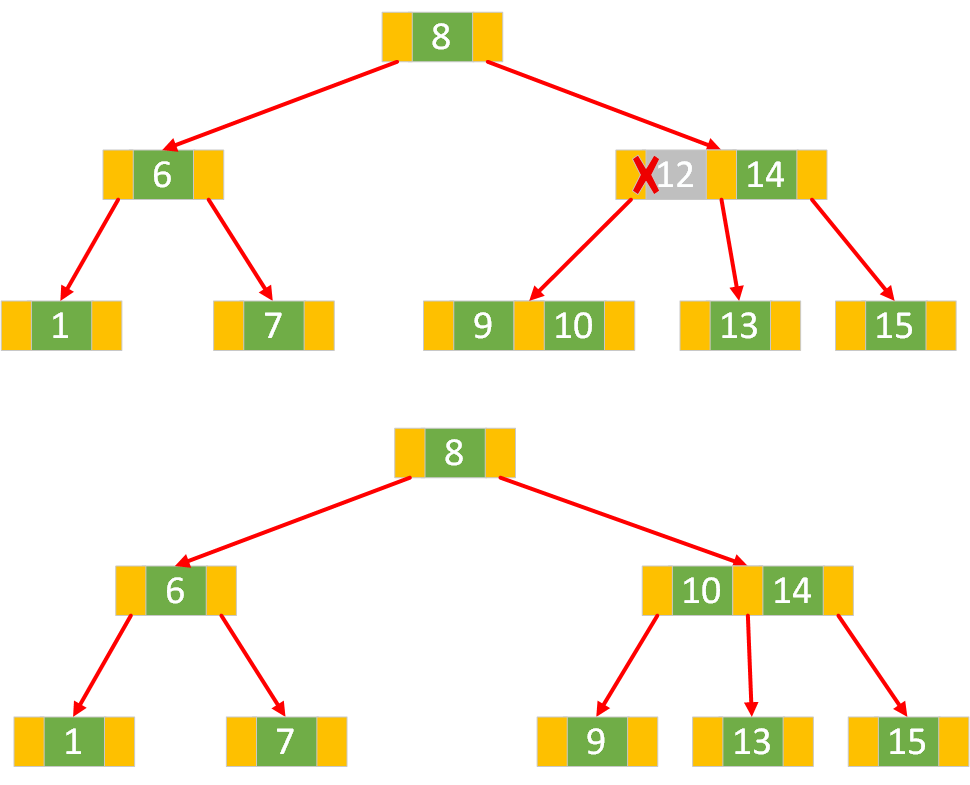
情况二:要删除的键在非叶子节点
使用中序遍历下的直接后继(或直接前驱)节点值来覆盖当前待删除节点的值,再删除用来值覆盖的后继节点(或前驱节点)。
删除后继节点的操作:
删除前驱节点的操作:




2. B树
B树是一种自平衡的多路搜索树,它具有多种重要属性,这些属性保证了其在数据存储和检索方面的高效性。下面从阶数、节点结构、高度平衡、键的有序性为大家做详细介绍:
- 阶数(Degree)
- 定义:B树的阶数用
m表示,它决定了每个节点可以容纳的键和子节点的数量范围。 - 节点键数量限制:除根节点外,每个内部节点至少包含
⌈m/2⌉ - 1个键,最多包含m - 1个键。⌈ ⌉ 表示向上取整,向上取整 ⌈1.5⌉ = 2- 根节点如果不是叶子节点,至少有 1 个键、两棵子树;
- 根节点为叶子节点,则可以有
0到m - 1个键。
- 子节点数量限制:每个内部节点的子节点数量比键的数量多 1。
- 除根节点外,内部节点的子节点数量在
⌈m/2⌉到m之间; - 根节点的子节点数量可以是
2到m个。
- 除根节点外,内部节点的子节点数量在
- 定义:B树的阶数用
- 节点结构
- 键:每个节点包含多个键,这些键按照升序排列。键用于对数据进行索引和查找。
- 子节点指针:每个内部节点包含多个子节点指针,用于指向子节点。子节点指针的数量比键的数量多 1,这些指针将节点的子树划分为不同的区间。
- 高度平衡
- B树的所有叶子节点都位于同一层,这保证了树的高度相对较低且平衡。无论从根节点到哪个叶子节点,路径长度都是相同的。这种高度平衡的特性使得B树在进行查找、插入和删除操作时,时间复杂度稳定在
O(log n),其中n是树中键的总数。
- B树的所有叶子节点都位于同一层,这保证了树的高度相对较低且平衡。无论从根节点到哪个叶子节点,路径长度都是相同的。这种高度平衡的特性使得B树在进行查找、插入和删除操作时,时间复杂度稳定在
- 键的有序性
- 节点内的键按升序排列,即对于节点中的任意两个键
key[i]和key[j](i < j),都有key[i] < key[j]。 - 子树之间也遵循有序性,对于一个内部节点的第
i个键key[i],其左子树中的所有键都小于key[i],右子树中的所有键都大于key[i]。
- 节点内的键按升序排列,即对于节点中的任意两个键
2.1 B树的节点插入
B树的节点插入流程和 2-3 树类似,比如现在有一棵 5 阶的B树,现有若干个节点,我们依次将其插入到这棵树中。
这棵 5 阶的B树初始状态为空,插入数据
[1, 3, 7, 14]
插入数据
[8],得到一个 6 - 节点,将其进行分解,中间的 key 提升为父节点,树的高度增加 1。
插入数据
[5, 11, 17]
插入数据
[13],右子树变为 6-节点,将其进行分解,中间 key(13)被提升为父节点,与原来的父节点合并
插入数据
[6, 12, 20,23]
插入数据
[26],右子树变为 6-节点,将其进行分解,中间 key(20)被提升为父节点,与原来的父节点合并
插入数据
[4],左子树变为 6-节点,将其进行分解,中间 key(4)被提升为父节点,与原来的父节点合并
插入数据
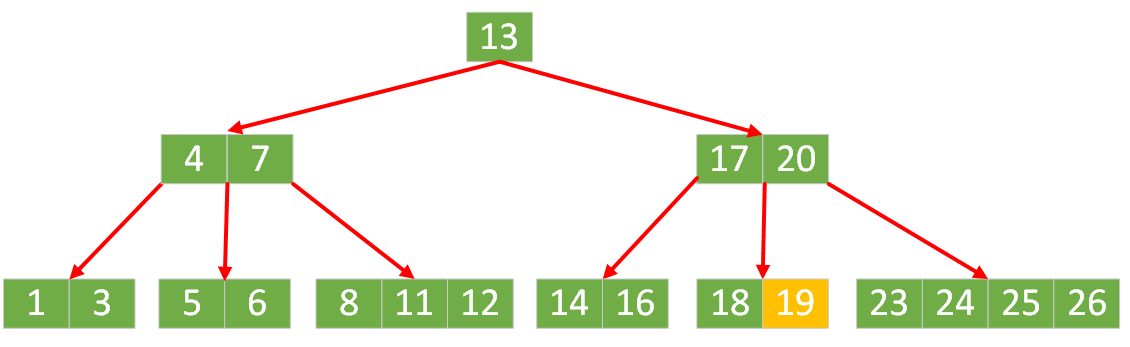
[16, 18, 24,25]
插入数据
[19],左4树变为 6-节点,将其进行分解,中间 key(17)被提升为父节点,与原来的父节点合并,此时父节点也变成了 6-节点,继续分解,中间 key(13)被提升为父节点,树的高度增加1。








2.2 B树的节点删除
现在我们上面构建的 5 阶B树为例,进行树节点的删除。

删除叶子节点
【8】,直接删除即可。
删除非叶子节点
【20】,找到该节点中序遍历的后继节点【23】,用后续节点值覆盖待删除节点值,并删除该后继节点。
删除叶子节点
【18】,5阶B树的每个节点中最少存储的键值数量为⌈5/2⌉-1 = 3-1 = 2。删除节点【18】之后剩余键值数量为 1,所以需要像兄弟借一个节点。- 从右兄弟节点中选出最小的 key 值给到父节点
- 从父节点中选出 key 值 位于中子树和右子树中间的节点
【23】给到中子树节点按大小顺序进行合并
删除叶子节点
【5】,5阶B树的每个节点中最少存储的键值数量为⌈5/2⌉-1 = 3-1 = 2。删除节点【18】之后剩余键值数量为 1,并且该中子树的左右兄弟都没有多余的节点可借,此时需要合并兄弟节点。合并左子树节点
【1,3】和中子树节点【6】,位于二者中间的父节点【4】需要下移
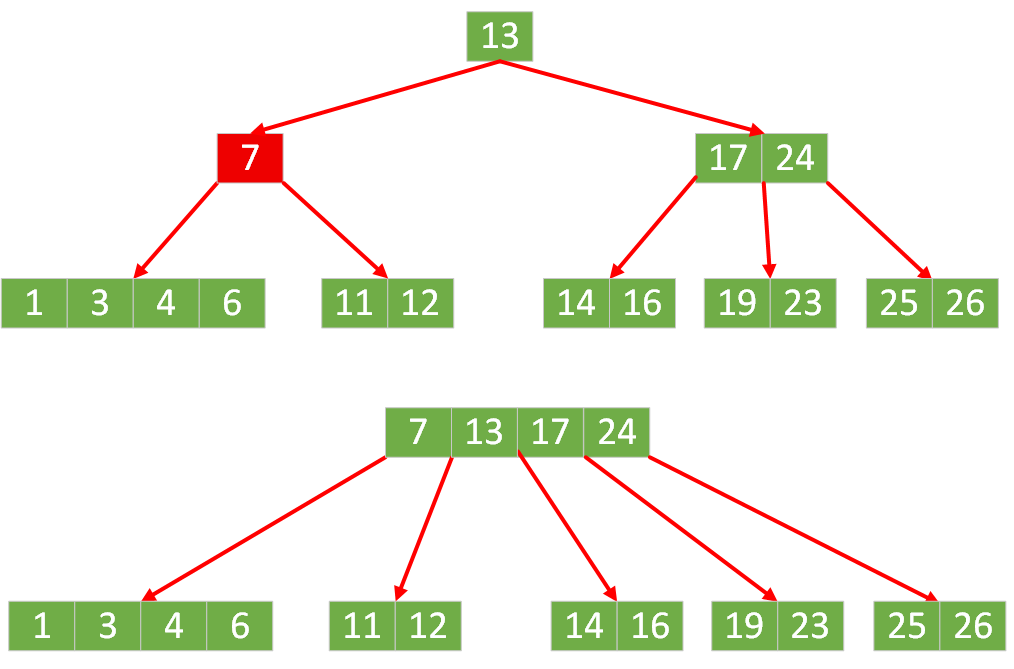
非叶子节点叶子节点
【7】中存储的键值不满足 5 阶B树的每个节点中最少存储的键值数量⌈5/2⌉-1 = 3-1 = 2,需要继续合并节点【7】和其兄弟节点【17,24】,位于二者中间的父节点【13】需要下移,树高度减少 1。




2.3 B树的应用场景
B树是一种高效的数据结构,特别适合在磁盘存储和大规模数据访问的场景中使用。以下是一些主要的应用场景:
文件系统
数据组织与管理:文件系统需要高效地管理大量的文件和目录信息。B树可以将文件的元数据(如文件名、文件大小、创建时间等)存储在节点中,通过树结构组织这些数据。由于B树的节点可以存储多个键值对,能充分利用磁盘的块存储特性,减少磁盘I/O操作。例如,当查找一个文件时,可从根节点开始,根据文件名的比较结果快速定位到包含该文件信息的节点,大大提高了文件查找的速度。
空间分配与回收:文件系统要管理磁盘的存储空间,包括文件的分配和回收。B树可以用于记录磁盘块的使用情况,每个节点存储一定范围内磁盘块的使用状态。当需要分配新的磁盘块给文件时,能通过B树快速找到可用的磁盘块;当文件被删除时,也能迅速更新相应节点的信息,实现磁盘空间的高效回收。
数据库系统
索引结构:数据库系统经常需要对大量的数据进行查询、插入和删除操作。B树常被用作数据库索引的基础结构,如在关系型数据库MySQL中,InnoDB存储引擎的索引就是基于B+树(B树的一种变体)实现的。数据库中的表可能包含数百万甚至数十亿条记录,通过在表的某些列上创建B树索引,查询时可以避免全表扫描,直接根据索引定位到包含目标数据的磁盘块,极大地提高了查询效率。
事务处理:在数据库的事务处理中,需要快速地对数据进行读写操作。B树的平衡特性和高效的查找、插入、删除操作,能够保证在并发事务处理时,数据的一致性和操作的高效性。例如,在一个银行系统的数据库中,多个用户同时进行转账、查询余额等操作,B树索引可以帮助系统快速定位和更新相关账户的数据。
内存数据库
数据缓存:在内存数据库中,虽然数据存储在内存中,访问速度很快,但当数据量较大时,仍然需要一种高效的数据结构来组织和管理数据。B树可以作为内存数据库的数据缓存结构,将频繁访问的数据存储在B树中,通过B树的高效查找和插入操作,提高数据的访问效率。例如,一些内存数据库在处理复杂的查询时,使用B树来存储中间结果,减少了数据的重复计算和访问时间。
并发控制:内存数据库通常需要支持高并发的读写操作。B树的结构可以方便地实现并发控制机制,通过对节点的加锁操作,保证在多个线程或进程同时访问数据时的一致性和正确性。例如,在一个多用户的在线游戏中,内存数据库使用B树存储玩家的游戏数据,当多个玩家同时进行游戏操作时,B树的并发控制机制可以确保数据的完整性和操作的正确性。
磁盘存储系统
磁盘阵列管理:磁盘阵列(如RAID)是由多个磁盘组成的存储系统,需要对这些磁盘上的数据进行高效的管理。B树可以用于磁盘阵列的元数据管理,记录每个磁盘块在阵列中的位置和状态。当需要读取或写入数据时,通过B树可以快速定位到数据所在的磁盘和位置,提高了磁盘阵列的读写性能。
数据备份与恢复:在磁盘存储系统的备份和恢复过程中,B树可以用于管理备份数据的索引信息。备份数据可能包含大量的文件和目录,通过B树可以快速定位到需要备份或恢复的文件,减少备份和恢复的时间。例如,在企业级的磁盘存储系统中,定期进行数据备份时,使用B树管理备份文件的索引,当需要恢复数据时,可以迅速找到相应的备份文件进行恢复操作。
为什么在处理磁盘I/O的时候使用的是B树,而不是AVL树或者红黑树呢?
从磁盘 I/O 的方向解释,B 树的搜索效率通常比 AVL 树或者 红黑树 高,主要原因在于 B 树的设计更适合处理磁盘存储和大规模数据访问。以下是详细的解释(以 AVL 树为例和 B树进行对比):
磁盘 I/O 的特点
访问速度慢:与内存相比,磁盘的访问速度非常慢,通常以毫秒(ms)为单位。
按块读取:磁盘读取数据时,通常以块(block)为单位,而不是单个字节或节点。
减少 I/O 次数是关键:为了优化性能,尽量减少磁盘 I/O 次数是设计数据结构时的重要目标。
B 树的设计优势
B 树是一种多路平衡搜索树,其设计非常适合磁盘存储,原因如下:
节点存储多个键值
B 树的每个节点可以存储多个键值(通常与磁盘块大小匹配),而不是像 AVL 树那样每个节点只存储一个键值。
例如,一个 300 阶的 B 树,每个节点可以存储多达 300 个子节点指针和 299 个键值。
这意味着一次磁盘 I/O 可以读取更多的数据,从而减少访问次数。
树的高度更低
B 树的分支因子(每个节点的子节点数)远大于 AVL 树(分支因子为 2),因此 B 树的高度更低。
- 对于 10000000 条数据:
- AVL 树的高度约为 34 层。
- 300 阶 B 树的高度仅为 4 层。
- 对于 10000000 条数据:
树的高度越低,搜索时需要的磁盘 I/O 次数越少。
减少磁盘寻址
B 树的结构使得每次磁盘 I/O 都能读取更多的数据,减少了磁盘寻址的开销。
例如,在搜索时,B 树只需访问 4 个节点,而 AVL 树可能需要访问 34 个节点。
AVL 树的局限性
AVL 树是一种二叉平衡搜索树,其设计更适合内存中的数据操作,但在磁盘存储场景下存在以下问题:
每个节点存储一个键值
AVL 树的每个节点只存储一个键值,这意味着每次磁盘 I/O 只能读取一个节点的数据。
对于大规模数据,这会导致大量的磁盘 I/O 操作。
树的高度较高
AVL 树的分支因子为 2,因此树的高度较高。
对于 10000000 条数据,AVL 树的高度约为 34 层,搜索时需要访问更多的节点,导致更多的磁盘 I/O。
频繁的旋转操作
AVL 树在插入和删除时可能需要频繁的旋转操作以保持平衡,这会导致额外的磁盘 I/O 开销。
对比示例
假设每次磁盘 I/O 读取一个节点:
B 树:高度为 4 层,搜索时最多需要 4 次磁盘 I/O。
AVL 树:高度为 34 层,搜索时最多需要 34 次磁盘 I/O。
显然,B 树的磁盘 I/O 次数远低于 AVL 树,因此在磁盘存储场景下,B 树的搜索效率更高。
3. B+树
B+树是B树的一种变体,广泛应用于数据库和文件系统中,具有以下显著特点:
数据仅存储在叶子节点
内部节点只存储键:B+树的内部节点仅存储键,用于导航,不存储实际数据。
叶子节点存储数据:所有数据都存储在叶子节点中,叶子节点通过指针连接形成一个有序链表。
叶子节点链表连接
有序链表:所有叶子节点通过指针连接成一个有序链表,便于范围查询和顺序访问。
高效范围查询:由于叶子节点有序连接,范围查询时只需遍历链表,无需回溯树结构。
高效磁盘I/O
减少I/O次数:B+树的内部节点仅存储键,单个节点可以存储更多的键,从而减少树的高度和磁盘I/O次数。
块利用率高:由于数据集中在叶子节点中,块利用率较高,适合大规模数据存储。

3.1 B树和B+树的区别
B树和B+树都是多路平衡搜索树,广泛应用于数据库和文件系统中,但它们在结构和应用场景上有一些关键区别。以下是它们的详细对比:
结构差异
B树
节点存储数据:B树的每个节点(包括内部节点和叶子节点)都存储键值对。
数据分布:数据分布在整棵树的各个节点中,查找时可能在任何节点找到目标数据。
子节点数量:每个节点的子节点数量介于⌈m/2⌉和m之间(m为树的阶数)。
B+树
内部节点只存储键:B+树的内部节点只存储键,不存储数据,数据仅存储在叶子节点中。
叶子节点链表:B+树的所有叶子节点通过指针连接成一个有序链表,便于范围查询。
子节点数量:与B树类似,每个节点的子节点数量介于⌈m/2⌉和m之间。
数据存储方式
B树
- 数据分散存储:数据分布在整棵树的各个节点中,查找时可能在任何节点找到目标数据。
- 查找效率:查找效率取决于目标数据所在的节点深度,可能在内部节点或叶子节点找到数据。
B+树
数据集中存储:数据仅存储在叶子节点中,内部节点只存储键用于导航。
查找效率:查找效率较为稳定,因为无论目标数据是什么,都需要遍历到叶子节点。
查询性能
B树
点查询:由于数据分布在整棵树中,点查询的效率较高,可能在中途找到目标数据。
范围查询:范围查询效率较低,因为需要遍历多个节点,且数据分布不连续。
B+树
- 点查询:点查询效率略低于B树,因为必须遍历到叶子节点才能找到数据。
- 范围查询:范围查询效率高,因为叶子节点通过链表连接,可以快速遍历范围内的数据。
磁盘I/O性能
B树
I/O次数:由于数据分布在整棵树中,查找过程中可能需要访问多个节点,导致磁盘I/O次数较多。
块利用率:由于每个节点都存储数据,块利用率可能较低。
B+树
- I/O次数:由于内部节点只存储键,单个节点可以存储更多的键,树的高度和磁盘I/O次数减少。
- 块利用率:由于数据集中在叶子节点中,块利用率较高。
应用场景
B树
适合点查询:适用于点查询较多的场景,如内存数据库或某些特定的文件系统。
数据量较小:在数据量较小、树的高度较低时,B树的性能可能优于B+树。
B+树
- 适合范围查询:适用于范围查询较多的场景,如数据库索引和文件系统。
- 数据量较大:在数据量较大、树的高度较高时,B+树的性能优于B树。

3.2 总结
| 特性 | B树 | B+树 |
|---|---|---|
| 数据存储位置 | 内部节点和叶子节点都存储数据 | 仅叶子节点存储数据 |
| 内部节点内容 | 存储键值对 | 仅存储键 |
| 叶子节点连接 | 无链表连接 | 通过链表连接 |
| 插入/删除 | 适合频繁更新 | 调整成本略高 |
| 范围查询效率 | 较低 | 较高 |
| 磁盘I/O性能 | 较差 | 较好 |
| 块利用率 | 较低 | 较高 |
B树和B+树各有优缺点,选择哪种数据结构取决于具体的应用场景和需求。B+树在数据库和文件系统中更为常见,因为它在大规模数据和高并发查询场景下表现更优。